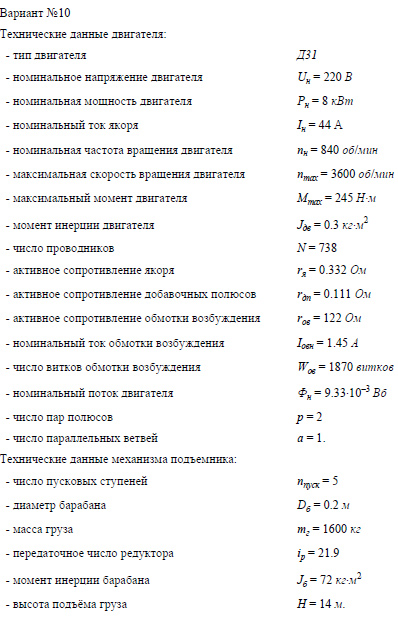
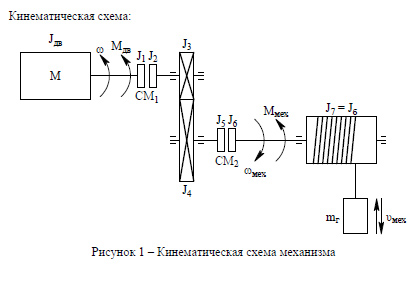
Задача №1.
1.1 Приведение моментов
инерции движущихся инерционных масс привода
к скорости вращения
электродвигателя.
Задача №2.
Расчёт и построение
графиков механических переходных процессов
электропривода
грузоподъемной лебедки.
Задача №3.
3.1 Разработать
принципиальную электрическую схему управления
электроприводом
грузоподъемной лебедки.
Техническое задание на
разработку:
3.1.1 Грузоподъемная
лебедка установлена на перегрузочном кране с
крюковым подвесом.
3.1.2 Режим работы
грузоподъемной лебедки – циклический. Цикл состоит
из следующих временных
операций:
3.1.2.1 Застроповка
груза (начало цикла).
3.1.2.2 Обтягивание
троса перед началом подъема груза.
3.1.2.3 Подъем груза.
3.1.2.4 Перемещение
крана к месту перегрузки груза.
3.1.2.5 Спуск груза.
3.1.2.6 Посадка груза.
3.1.2.7 Расстроповка
груза.
3.1.2.8 Обтягивание
троса перед подъемом пускового крюка.
3.1.2.9 Подъем пустого
крюка.
3.1.2.10 Обратное
перемещение крана к месту нахождения перегружаемого
груза.
3.1.2.11 Спуск пустого
крюка.
3.1.2.12 Посадка
пустого крюка.
3.1.3 Питание силовых
цепей и цепей управления осуществляется от
напряжения постоянного
тока 220 В.
3.1.4 Управление
электроприводом осуществляется оператором...